Output CAN data
CAN address information
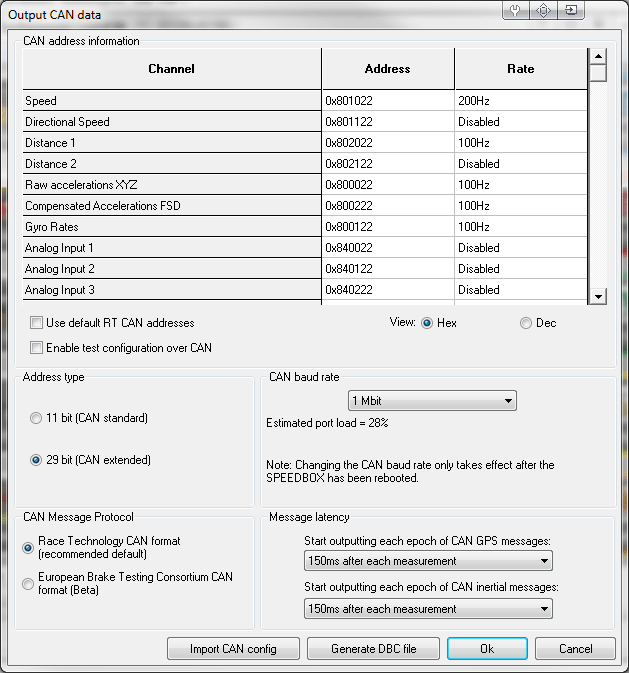
Each CAN message that can be generated by the SPEEDBOX is listed (for more detailed information on the format of each CAN message, please refer to the CAN message reference
here). Not all messages are available on all SPEEDBOX versions, e.g. the INS messages are only available on the SPEEDBOX-INS. For each message, the CAN address can be independently configured, and the message rate can be set. The dialog will warn if any duplicate addresses are set, and will colour duplicates red to aid identification. The dialog will also calculate the approximate CAN bus loading as the message rates are set, and will issue a warning at bus loadings above 70%, and will not allow configuration of bus loadings above 90%.
By ticking the box ‘Use default RT CAN addresses’, all addresses will be reset to the default values which work with the .dbc file available for download from the Race Technology website. This is recommended unless different CAN addresses are specifically required.
Addresses can be viewed in either hexadecimal (default) or decimal format. This is simply for the convenience of the configuration software user, and does not affect what is sent to the SPEEDBOX.
Address type
The CAN address type can be set to either 11 bit (CAN standard) or 29 bit (CAN extended) addressing. All messages share the same address type.
CAN baud rate.
The CAN baud rate can be set to either 125 kbit, 250 kbit, 500 kbit or 1 mbit per second. Normally either 500 kbit or 1 mbit is used. The highest throughput is given by 1 mbit. The configuration dialog will calculate the approximate CAN bus loading that would be caused by the currently configured message rates, CAN baud rate and address type and will issue a warning at bus loadings above 70%, and will not allow configuration of bus loadings above 90%.
CAN message protocol
This should be left as Race Technology CAN format, unless the alternative Euro Brake Testing Consortium format is specifically required. Note that the alternative format is still currently in pre-Beta state, and message output rates are not configurable.
Message Latency
CAN messages may be set to be output as soon as possible, in which case the latency is indeterminate, or they may be set to output with a fixed latency. The available fixed latency is 150ms for GPS messages, and 30ms for inertial and INS messages. The latency specification refers to the first message of each type. For inertial/INS messages this will be speed if configured for output. The CAN output will prioritise meeting the inertial/INS latency setting over and above meeting the GPS latency setting should there be a conflict.
Generate DBC file
Clicking the "Generate DBC file" button will bring up a dialogue box which will enable the saving of a .dbc file which will work with all the listed messages using the addresses currently configured, regardless of whether each message is enabled or not. This enables the user to easily generate a custom .dbc file for their desired configuration.