SPEEDBOX-INS - Quick Start Guide For Braking Applications
Installing the system in the vehicle
Important: It’s essential that the roof mounted sensor and antenna assembly is installed correctly in accordance with these guidelines, failure to do so can dramatically increase error. Further, note that the roof assembly includes a very high precision sensor array that is shock sensitive – please take care not to drop!
The roof mounted sensor assembly should be mounted to meet the following criteria:
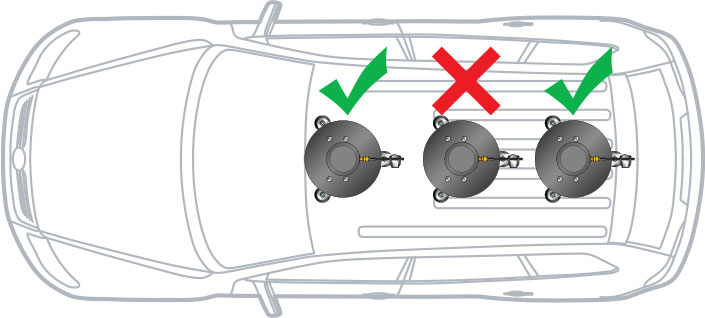
- It must be mounted on an area of the roof with high stiffness, this is typically on the leading or trailing edge of the roof. Do not mount in the centre of the roof.
- The cable should exit from the roof assembly towards the rear of the car
- Typically the unit should be on the centre line of the car
- The unit should be within 10 degrees of level in the pitch direction
- The unit should be as level as possible with regards the roll direction
The main electronics unit can be mounted almost anywhere in the vehicle, subject to keeping it away from sources of high radio interference, high vibration, and high temperature. It doesn’t need to be mounted in any particular orientation.
The DASH4PRO is typically mounted on the windscreen. Note that there are 2 types or DASH4PRO, using either OLED or LCD display technology. The OLED is clearer, but will “wash out” if there is sunlight directly on the screen. The LCD type is slightly less clear, but remains usable in all lighting conditions.
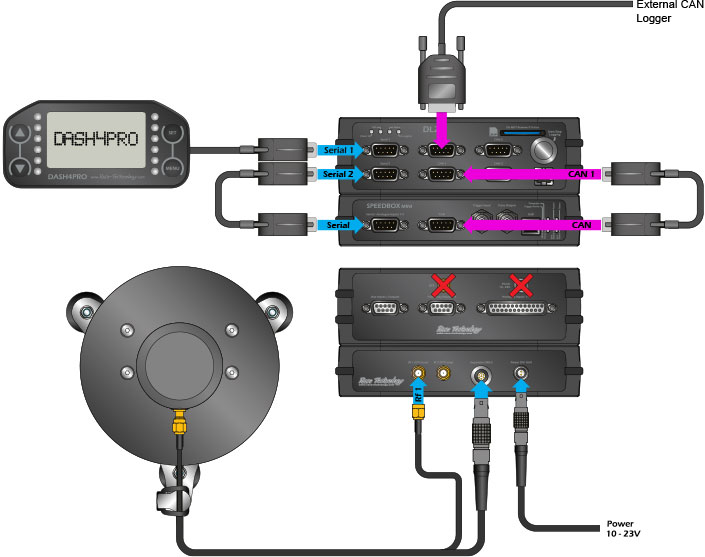
Connections, standard (non-RTK) system
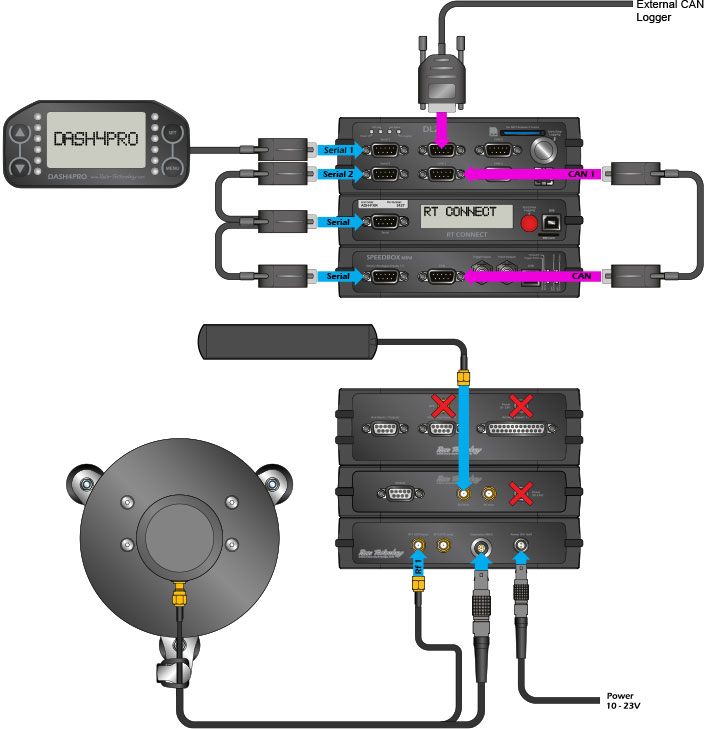
Connections, RTK (2cm positioning) system
Roof mounting position diagram:
Installation checklist:
- The system requires a nominally 12v power supply from the vehicle at about 500mA, a fuse rating of around 2A is recommended. If this power is lost, even briefly then the system will have to re-initialised so a reliable connection is essential.
- Make sure that the antenna connection to the SPEEDBOX (with the gold SMA connector) is “finger tight”, or about 0.5Nm. If this connection becomes loose then the quality of the GPS data is severely affected. If it is over tightened then the connector maybe damaged.
- Please use the screws to secure all D type connectors to the SPEEDBOX.
- Take care not to pinch/damage the cables that go from the roof INS assembly to the main SPEEDBOX unit
- Use the supplied SD card, formatted as FAT32. Whilst the DL2 is compatible with nearly all SD cards, the cards we supply are pre-tested for speed, compatibility and errors.
- Keep the GPS antenna and all system cables away from any sources of radio interference. Sources of high radio interference include, but are no limited to, video cameras, radio telemetry equipment and mobile phones.
- Make sure that all equipment is securely fixed down in the car prior to use, in particular check that the main unit is held down in the vehicle, and the DASH4PRO’s windscreen suction mount does not have the red line visible when mounted.
- Before using the SPEEDBOX it is good practice to check the “error” light. If this is flashing then count the flashes and check what the error code means.
- Make all connections (including roof sensor, radio connections, all d-types) before powering the system.
- Whilst there are no particular mounting requirements for the in car electronics, they should be mounted in a way to avoid excessive vibration, and when possible not in direct sunlight. If the vehicle is parked with strong sunlight directly onto the windscreen, it is good practice to remove the DASH4PRO. Strong sunlight can cause the vacuum mount to release, and the DASH4PRO unit itself to get very hot.
- Finally note that whilst the roof assembly and the DASH4PRO are water resistant, the main electronics unit is not and needs to be protected for rain or spray.
- The CAN data is taken from CAN port 1 on the DL2. The default configuration is for a latency of 150ms and 1Mbit. The .dbc file for this can be found as part of the standard installation: C:\Program Files (x86)\RaceTechnologyV8.5\Otherfiles\DBC Files.
- There is one termination resistor at the SPEEDBOX, so a 120 ohm termination resistor will be required at the data logger. Standard pinout for the d-type, CAN L on pin 2, CAN H on pin 7.
Output offset
Once the system is installed on the vehicle the output offset from the antenna on the roof to the point of interest must be set. The reference point can be to the centre of gravity or to match another sensor.
- Start up the SPEEDBOX configuration software, connect to the USB port on the DL2. Wait for Windows to install the USB driver.
- Select the serial port from the drop down list in the Communications, most likely USB Port xx, where xx is a number from 1 to 99.
- Click Read Configuration and the configuration will be read back from the SPEEDBOX.
- Click on the Vehicle Installation box, make sure that Measurement output offset is enabled and fill in the measurements. These are the measurements from the roof unit to the point of interest. There are various pictures available from a drop down menu to help.
- Click OK to store these and then Send Configuration to store this on the SPEEDBOX, a bar will show progress during the configuration process.
System initialisation
Once the system is installed in the vehicle the system needs to be initialised before you can start any brake testing. The procedure is very simple and typically takes a few minutes. If power is lost from the system then the procedure needs to be repeated:
- Power up the system. At this stage the DASH4PRO will report the firmware versions, and report any system errors.
- Allow the system to get a GPS fix, with a clear view of the sky this takes about 30 seconds to 1 minute. The number of satellites are displayed on the DASH4PRO.
- The vehicle now needs to be driven to allow the INS system to “converge”. For initial INS convergence no particular driving manoeuvres are needed, and typically 2 minutes of normal driving is sufficient. Whilst at this stage the INS system is useable, it hasn’t achieved full accuracy. To achieve full accuracy, the INS needs to see a wider range of dynamics. The quickest way to achieve this is to drive in a figure of 8 to achieve significant lateral forces in both directions, followed by some accelerations and braking manoeuvres. There is no need for very high accelerations, 0.5g is certainly sufficient, although in practice the higher the dynamics the INS sees, the quicker the INS will achieve full accuracy.